
(BB_TRACKER
V4.6 21_March_2013)
DRIVER & HARDWARE PARA O PROGRAMA ORBITRON COMANDAR DOIS ROTORES DE TV MONTADOS NUM SISTEMA PORTÁTIL DE SEGUIMENTO DE SATÉLITES
INDICE
- Como instalar o Driver no ORBITRON e fazer o Dowload do Driver
- KIT e placas de circuito impresso
- Contacte-nos para saber mais sobre o KIT
- GALERIA DE FOTOS para perceber a ideia

Teste do protótipo em campo
http://db.tt/TOF7BLpN
INTRODUÇÃO
A intenção de entrar no mundo dos satélites e do espaço a baixo custo e, por outro lado, permitir que alguns dos nossos colegas o possam fazer, levou-nos a desenvolver um Driver para o programa Orbitron comandar 2 Rotores de preço moderado, permitindo assim, efectuar o seguimento de Satélites, Lua, Sol etc. com um sistema completo, cujo preço dos componentes e ferragens adquiridos no mercado não deverá ultrapassar os 400,00 €.
Com a utilização de antenas de razoável ganho, o sistema optimiza os contactos
de horizonte a horizonte e, acima de tudo, livra-nos as mãos para corrigir o
efeito Doppler, escrever e segurar o microfone - o que já não é pouco...
O sistema consta de um Driver de software que pode ser descarregado na página acima indicada .
Este Driver, extrai a cada momento o Azimute e a Elevação do satélite seleccionado no ORBITRON e envia-os para uma placa Micro-Controladora que vai comandar os controladores dos rotores através de um conjunto de Leds indicadores, instalados em placas por cima dos controladores.
Estamos a elaborar um manual que explicará como montar o Kit, instalar e operar o sistema. Para já, mostramos a seguir as fases de desenvolvimento da ideia sendo que, no final, teremos três placas de Circuito Impresso (PCB) com todas as peças electrónicas para montar seguindo as instruções do manual de montagem.
DRIVER PARA O ORBITRON
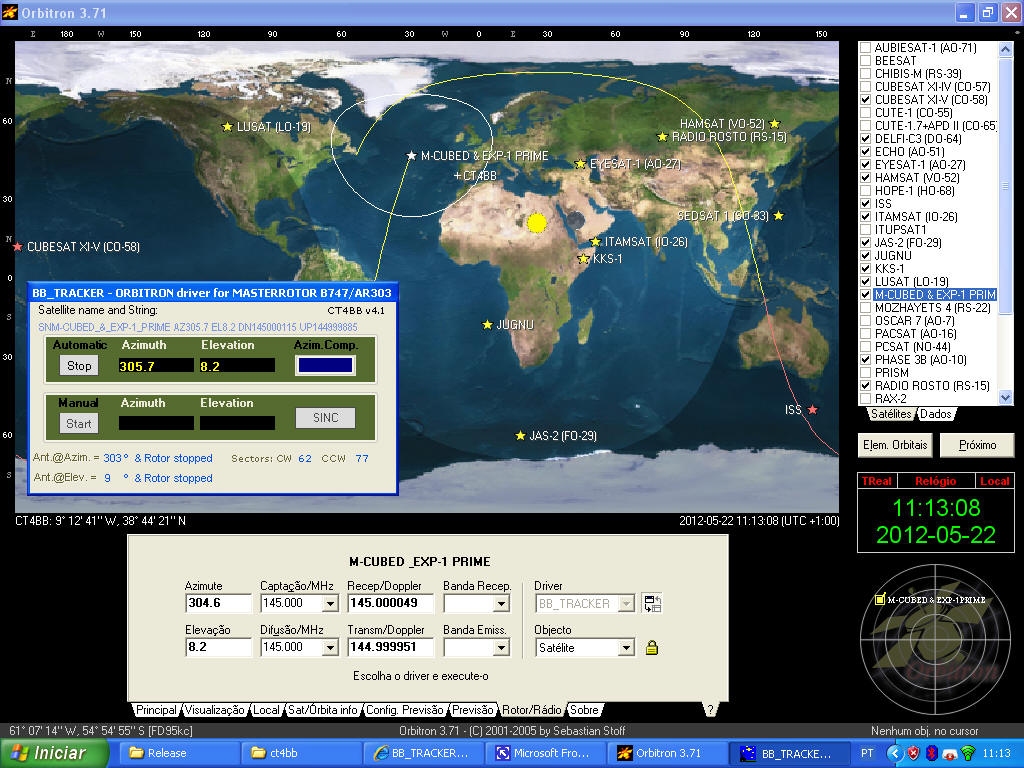
Aspecto do driver activado dentro do ORBITRON
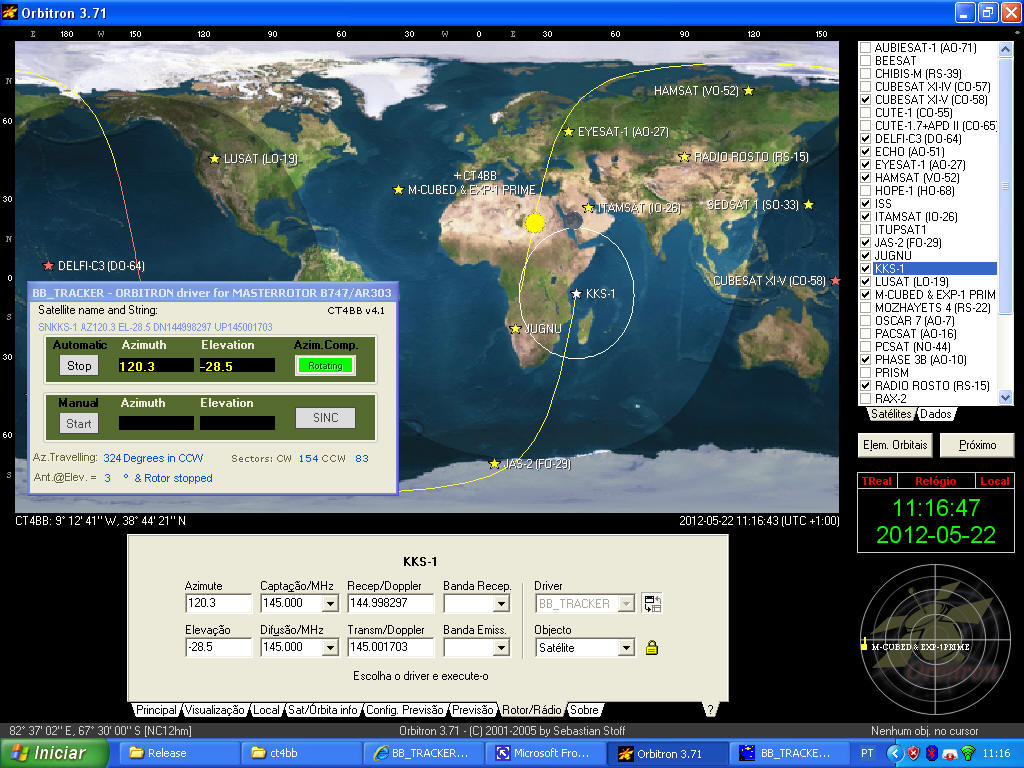
A janela de Compensação de
azimutes em verde, indica que o rotor está a compensar com uma rotação inversa, para evitar o enrolamento
dos cabos em torno do mastro .
Antes da compensação iniciar, esta janela toma a cor laranja para avisar o operador que vai efectuar a compensação
numa próxima leitura.
Este aviso permite-nos gerir o QSO, para que não seja cortado bruscamente com o
inicio de uma compensação
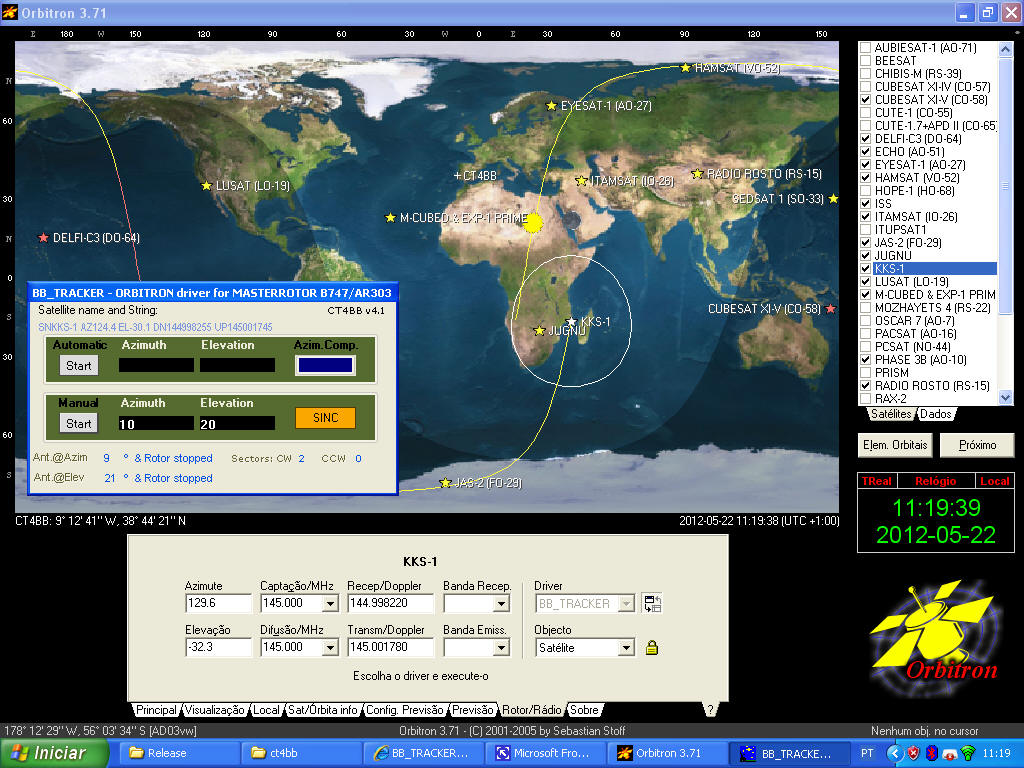
Quando se activa o Driver, o botão de sincronismo fica
activo em cor de laranja, para se proceder ao sincronismo do sistema de
antenas e controladores para o Azimute e Elevação zero.
É conveniente mas não necessário, antes de uma passagem do satélite, proceder a um sincronismo
do sistema.
Nota : Cada quadrante tem 15 sectores de 6º . Uma rotação de 360º tem 60 sectores.
Características
- Sistema de baixo custo para seguimento de satélites.
- Pode ser montado por qualquer radioamador com o mínimo de conhecimentos.
- Disponibilizamos as Placas de circuito impresso e todos os componentes electrónicos incluindo o microcontolador programado, 5 "Flat cables" Fichas. Só não é fornecido o cabo UTP.
- O Driver funciona integrado no programa ORBITRON de seguimento de satélites que está disponível na Internet .
- Os Rotores utilizados são os modelos MASTERROTOR B-747 ou o AR-303 para antenas de TV que são dos mais económicos do mercado e suportam as antenas de VHF e UHF.
- O conjunto é composto por 3 placas de circuito impresso : Uma placa com um microcontrolador e duas placas com leds de posicionamento angular, para os Azimutes e para as Elevações.
- A precisão é de +- 3 graus que é suficiente para os ângulos de abertura das antenas utilizadas em VHF e UHF até 13 elementos.
- O sincronismo coloca a orientação da antena no Azimute e Elevação zero.
Custos
O custo total deste sistema portátil para tracking de satélites, é cerca de 400,00 € .
A saber :
- Os 2 Rotores - MASTERROTOR B747 ou AR303 - Adquirem-se no mercado por cerca 120,00 € (50,00 € cada um + portes. Por exemplo a ct2jwv(@)sapo.pt)
- O nosso KIT com 3 Placas de circuito impresso com componentes montados, 5 cabos planos fichas e micro-swithes por 155,00 € (+ portes de correio + IVA )
- O Tripé ou um suporte de Sombreiro de jardim custam cerca de 30,00€.
- Uma fonte de alimentação que pode ser de um velho PC onde se aproveitam os + 12 V com 2 Amperes no mínimo. Ou, então, adquirir uma fonte 12V 2A - 30,00€.
- Tempo e paciência para montar o Kit (€ ? ).
Desvantagens
1 - Os rotores, ao fim de meia volta
(180º), têm um erro de cerca de +- 5º entre a posição deles e a indicada pelos controladores.No
entanto este erro não prejudica a precisão do tracking dos satélites com as
antenas que normalmente utilizamos com lóbulos de abertura superiores ao erro.
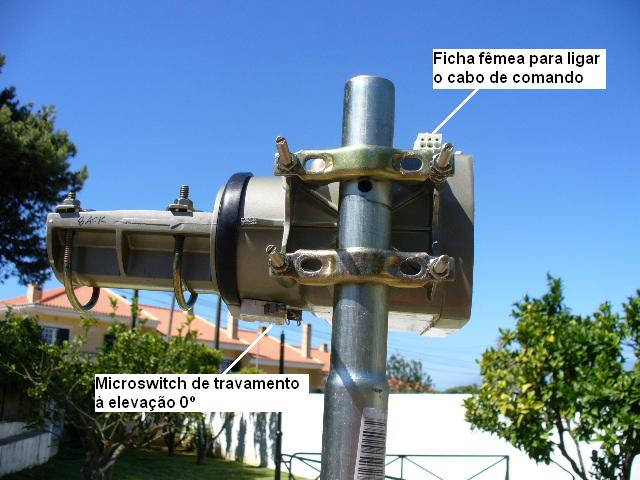
2 - As antenas devem ser instaladas
com o centro de gravidade do "Boom" apoiado no Rotor das elevações, para evitar
uma rotação por deslizamento do rotor.
Vantagens
1 - Preço baixo.
2 - Possui características suficientes para utilizar no seguimento de satélites de Amadores, Meteorológicos e de Investigação .
3 - Há apenas uma modificação a realizar no interior do Rotor dos azimutes destinada a serrar os 2 pinos de travamento.
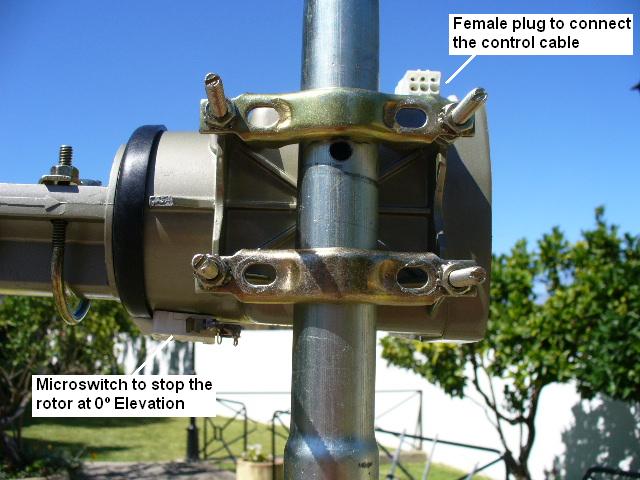
4 - A adaptação dos rotores, limita-se a colar um microswitch exterior em cada um deles e a fixar um pino na gola de borracha que actuará o microswitch no Azimute 0º e na Elevação 0º.
5 - O sistema sincroniza para calibrar o azimute e a elevação zero.
6 - O sistema não permite que os cabos se enrolem em volta do mastro fazendo automaticamente o seu desenrolamento "Urolling".
7 - A colocação das placas com os leds de posição angular em cima dos controladores é simples: basta retirar os botões e as lâminas de contactos e colocar nesse local as placas de leds.
8 -
Qualquer Radioamador com o
mínimo de investimento e habilidade, pode instalar sistema de comunicações via
satélite a baixo custo.
9 - Pode ser comandado remotamente pela Internet, porque os
todos os comandos
dos rotores são inseridos por software. Basta entrar no PC remoto através da Net.
Material necessários para se fazer um sistema completo:
- Dois ROTORES com os respectivos controladores MASTERROTOR B- 747 ou AR-303. Um TRIPÉ (Quadripé) , Um TUBO com 1,5 metros que caiba dentro da viatura



- Três Placas de circuito impresso:
2 Placas equipadas com leds de posição relativas aos azimutes e elevações que se montam nos controladores dos rotores.
1 Placa Mãe equipada com um microcontrolador programado para se instalar na caixa ou no chassis, onde se fizer a montagem. Nós montámos o protótipo numa base de madeira.
- Um Tripé da Gimi ( http://www.gimi.eu/products.php?subcat=65&id=179&curr=6&to=prev ) comprado no Leroy Melin por 30,00 €, adequado à montagem de um tubo rotativo ou então uma base de um guarda-sol de jardim onde de prenderá o rotor dos azimutes.


- Uma Fonte de alimentação de 12V 2 A .
- Cinco Cabos fita "Flat Cable" de 16 condutores com fichas ICD16 fêmea para ligar a placa do microcontrolador às placas dos leds de posição.
- Um cabo duplo: constituído por dois cabos UTP CAT5
de 4
pares com 10 metros de comprimento necessários para controlo dos rotores. Numa
ponta tem uma ficha macho DB15
que liga os cabos à placa do Micro-controlador e, na outra ponta, tem fichas normais
de alimentação tipo plug-in. Esta ficha multipino facilita a mobilidade e
portabilidade do sistema.
Pode-se evitar a utilização da ficha multipino e conectar directamente o cabo de
pares aos rterminais 1,2,3 dos respectivos rotores.

- Uma caixa metálica onde se montam os controladores e a Placa mãe. Por exemplo, a caixa metálica de um velho PC é óptima.
- Um Driver BB_TRACKER , cujo Download é descarregado da Internet
O texto seguinte explica como desenvolvemos o protótipo Mula.
O Driver do BB_TRACKER corre em
ambiente Windows, inserido na directoria do Orbitron de onde extrai os dados de
posição dos satélites, envia-os para a placa do microprocessador que comanda
os controladores dos rotores dos azimutes e das elevações.
Para a indicação dos azimutes, há uma placa de circuito impresso com 60 leds em circunferência e em ângulos de 6 em 6 graus ( Sectores de 6º) que são suficientes para manter o seguimento dos satélites com antenas de até uns 20 dB de ganho.
Para as elevações apenas se fazem 15 furos na placa, correspondentes aos 15 sectores de 6 graus (entre 0 e 90º).
Nos discos rotativos dos controladores, instala-se um fotodíodo que, ao rodar, detecta o led aceso e pára.
O software calcula o trajecto mais curto
em função do ponto onde se encontra a antena orientada.
O programa avisa previamente que vai efectuar um reset de compensação de voltas, para evitar o enrolamento dos cabos em torno do suporte das antenas.
DIAGRAMA DE BLOCOS DO PROJECTO
![]()
O Hardware simula actuação manual do controlador e recebe informação do Software
fazendo o seguinte:
1 - Acende os leds do azimute e da elevação para onde os rotores se devem deslocar .
2 - Liga as correntes de alimentação dos controladores e simultaneamente dos rotores através dos relés RL1 e RL2
3 - Actua os Relés RL3 e RL4 para definir a direcção do movimento dos rotores: Nos azimutes se é CW ou CCW .Nas elevações se a direcção do rotor é para cima 90º(UP) ou para baixo 0º(Down).
Quando o foto diodo de cada um dos controladores alcançar o led aceso manda uma informação ao microcontrolador para ele desactivar todos os dispositivos anteriormente accionados e uma informação para o PC dizendo que terminaram os movimentos.
Os relés RL5 e RL6 destinam-se a cortar a corrente dos rotores mantendo-a nos controladores para se fazer o sincronismo.
O software adquire os dados Automaticamente do
Orbitron ou Manualmente processando-os do seguinte modo:
- Extrai os dados do Orbitron através do protocolo
DDE (Dinamic Data Exchage) numa string em formato SatsCape.
- Insere esses dados nas janelas de leitura para visualização.
- Processa os dados das janelas comparando os
valores com os intervalos dos sectores e
envia um sinal referente ao ângulo para onde o Micro deve enviar o rotor,
acendendo o led do sector onde se insere esse ângulo.
- O Software compara também os dados actuais com
o anterior para saber sempre em que sentido mais curto se deve deslocar o rotor (CW ou
CCW) . Calcula o numero de sectores CW e CCW para onde o rotor se dirigiu
para processar essa informação avisar para se fazer um RESET à rotação da
antena . Se o RESET manual não for efectuado, o software fá-lo-á posteriormente.
Esta acção é necessária para evitar o enrolamento dos cabos das antenas em
torno do suporte. É sempre conveniente fazer o RESET prévio a uma passagem do
satélite para evitar que tal aconteça durante um QSO e se perca um minuto de
QSO com a rotação de 360º
- Mesmo depois de desligado o PC, os dados
relativos à posição da antena são guardados. Por isso, ao ligar o programa
a indicação (azimute e elevação) da ultima orientação estará sempre presente e, se nada foi forçado
fisicamente na antena, corresponderá à posição em que ela se encontra.
- No caso dos valores da Orientação indicados pelo programa não corresponderem à orientação real da antena, é porque algo foi forçado. Para corrigir, bastará activar o botão SINC quando estiver activo em laranja que vai sincronizar o sistema.
Botões
- Botão- Start/Stop para accionar o sistema
automático de tracking
- Botão- de Start para accionar o sistema manual onde se inserem nas janelas os azimutes e as elevações dos repetidores e comunicações que se pretendem.
- Botão- SINC Para sincronizar a orientação real dos rotores com os controladores.
Sinalizações
- A sinalização RESET . Só para a reposição de azimutes com um volta completa de 360º e com passagem pelo zero. Destina-se a compensar o enrolamento dos cabos das antenas. Aparece um aviso de RESET em laranja antes de se iniciar o RESET automático. Isto evita que, durante a passagem dum satélite, se efectue um reset com perda de um minuto de QSO.
DIAGRAMA DE FUNÇÕES DO SOFTWARE
Em modo automático
1º Captação da String do Orbitron
2º Colocação dos dados nas janelas do automático
Az e El
3º Conversão dos dados em numérico matemático de Az
e El
Azimutes:
Comparação dos dados de Az para detecção do
sentido de movimento CW ou CCW.
Contagem de CW/s e CCW/s para saber quando se
deve compensar
Procura do sector (60 sectores angulares)
para saber qual o led a acender
Depois de
detectado o sector, enviam-se os comandos a seguir indicados para o
microcontolador.
Nota: Antes de enviar os comandos, o software vai comparar o dado novo do ângulo com o anterior e, se for igual, não envia qualquer comando para o Micro.
Se for diferente envia os seguintes comandos:
1º -
Liga um dos 60 leds do sector angular respectivo
2º -
Liga o sentido de movimento do controlador
3º -
Liga corrente do controlador do rotor
O movimento de rotação dos Azimutes e das Elevações é simultâneo,tornando rápida a orientação .
Nota: Ao rodar, o fotodíodo da elevação e do
azimute vão encontrar o respectivo Led aceso no sector indicado pelo
Orbitron-Driver e enviam o sinal para o "triger" 7415 que param o seguimento
respectivo através das portas do microcontrolador RC6 e RC7 que fazem desligar todos estes comandos e apagar o led.
O programa continua a ler os dados e, assim que o azimute sai fora do sector de 6 graus (+- 3) é enviada nova informação para o micro comandar novamente o rotor para o sector seguinte ou novo sector de um outro satélite escolhido.
Elevações:
Comparação
dos dados de Elevação para detecção do sentido de movimento UP ou DW. ( Não há
compensações de rotação porque a deslocação é de apenas 90º para cima ou para
baixo.)
Procurar o sector da Elevação(15 sectores angulares de 0º a 90º) para saber qual o led a acender no respectivo sector.
Depois de detectado o sector, enviam-se os
comandos todos da Elevação para o microcontolador
Nota: Antes
de enviar os comandos, o software vai comparar o dado novo com o anterior se for igual não
envia qualquer comando ao micro e se for diferente envia os seguintes comandos:
1º -
Liga um dos 15 leds do sector angular respectivo
2º -
Liga o sentido de movimento do controlador
3º - Liga a corrente do controlador do rotor
Em modo Manual
O modo manual é igual ao automático com
excepção da origem dos dados
Inscrição manual dos dados é efectuada na janela MANUAL .
Prime-se START e os rotores orientam-se para os valores inseridos.
**************************************************************************************************************************************************************
***********************************************************************************************************************************************************************
COMO DESENVOLVEMOS O SISTEMA
Fixamos o rotor das elevações horizontalmente, fazendo uma furação extra nas pontas das abraçadeiras que permitiu a montagem que se mostra
Como modificámos os controladores e realizamos o protótipo
( O exemplo mostrado é para o controlador dos azimutes. Para o controlador das elevações procede-se exactamente do mesmo modo)
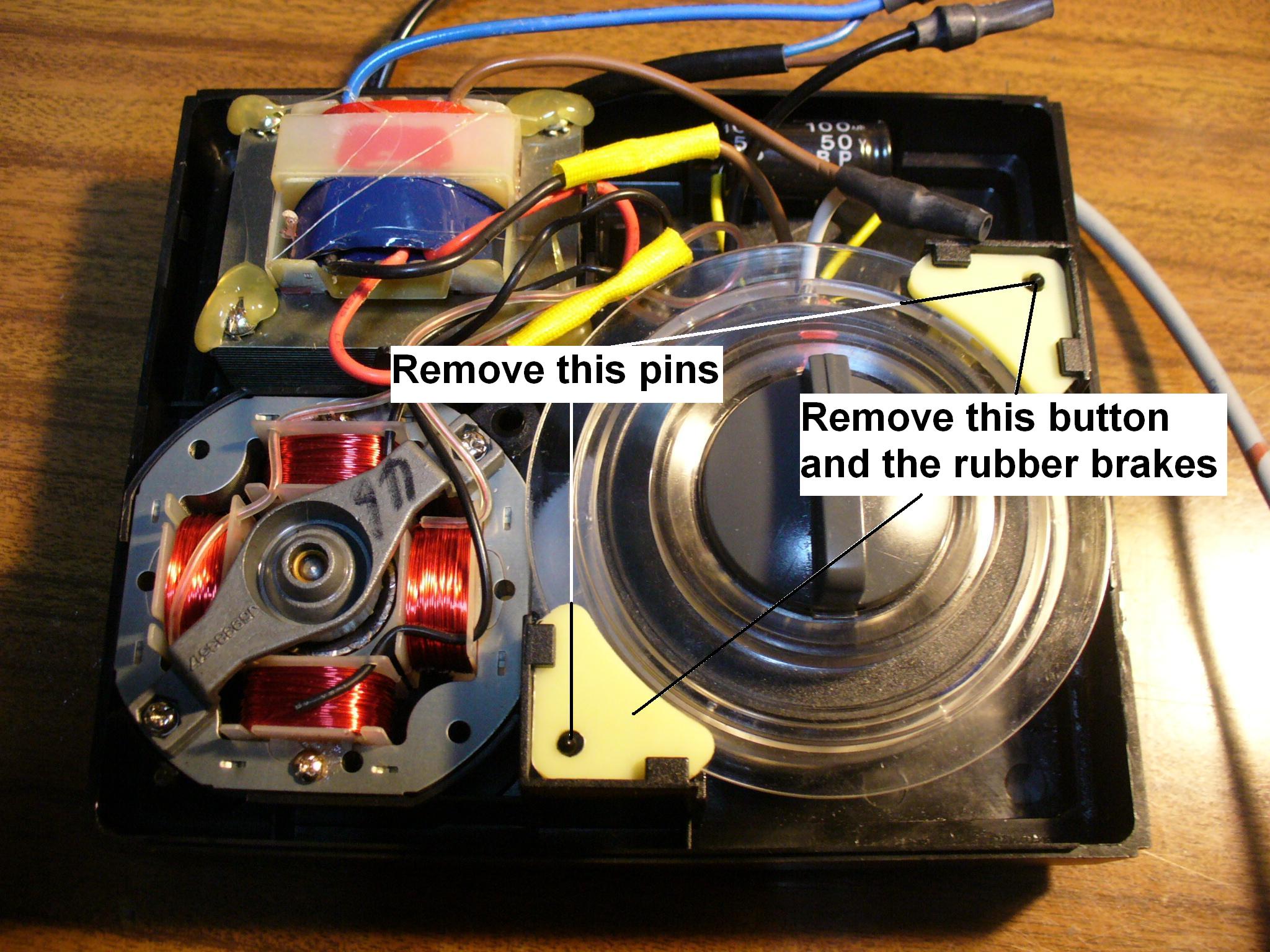
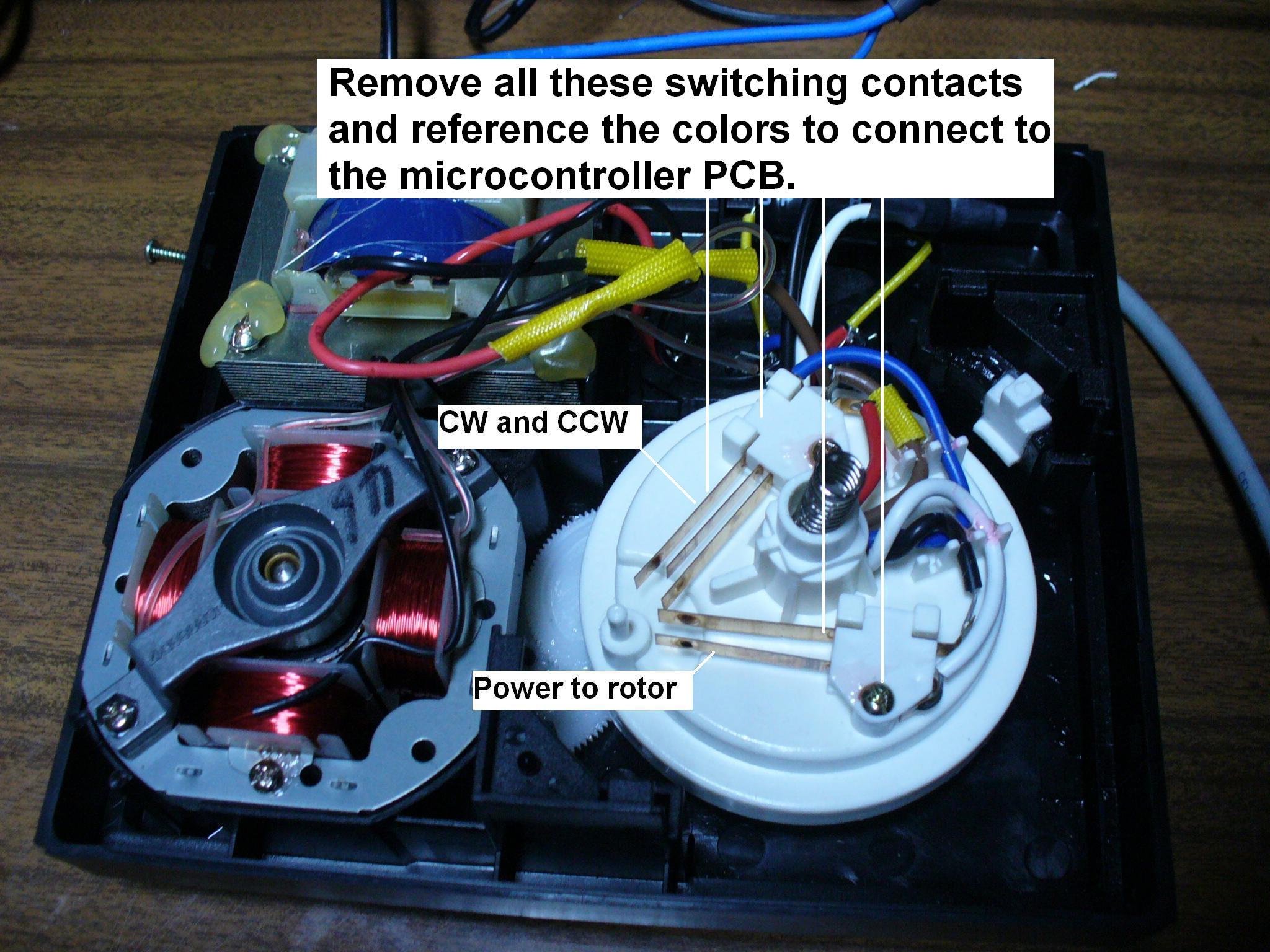
Depois de retirado o botão, retiraram-se as lâminas dos contactos

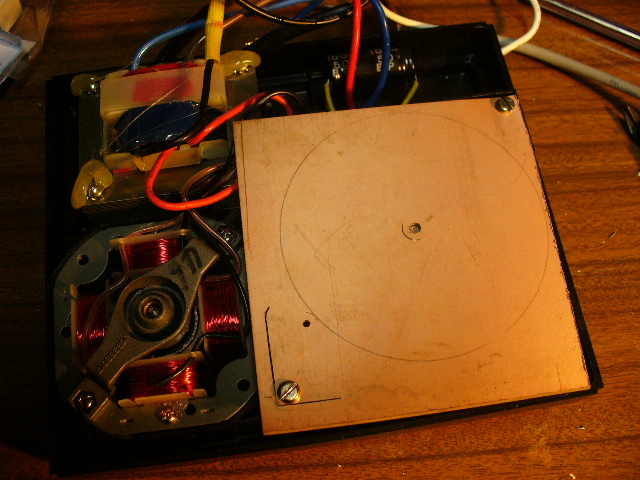
Contactos removidos Alinhamento da placa de circuito impresso
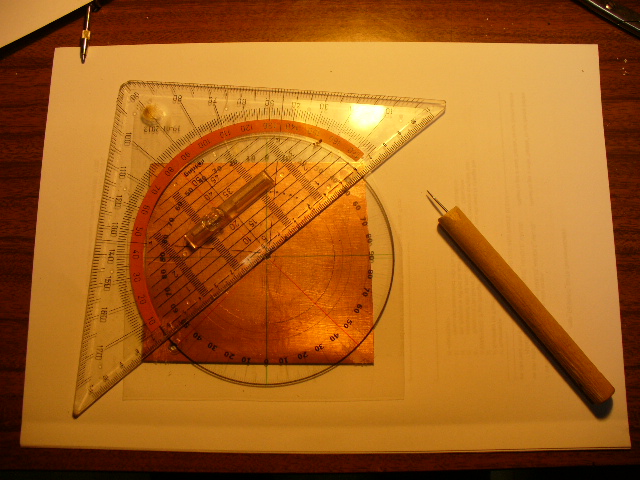
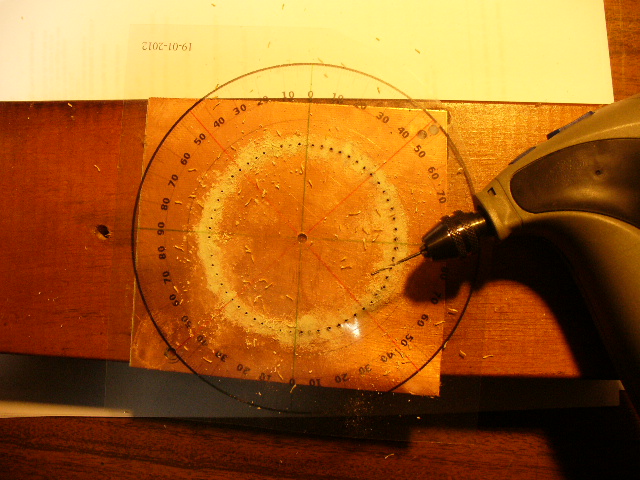
Marcação da furação Realização da micro furação prévia
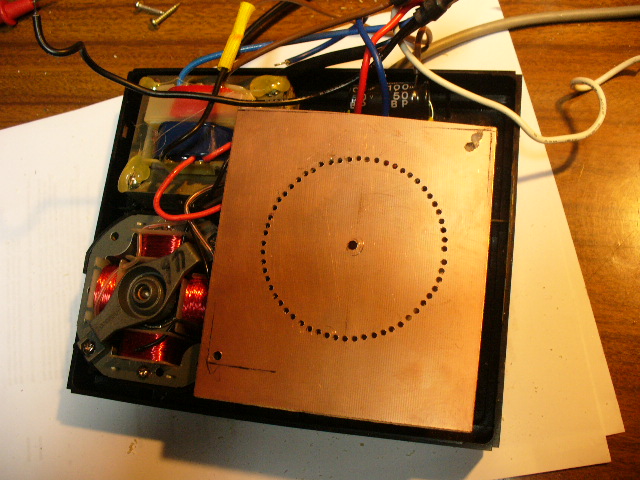
Evolução da disposição das placas, componentes e controladores
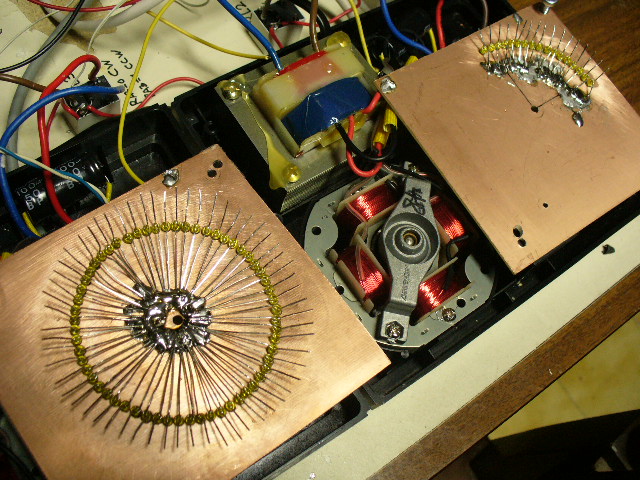

Colocando os 60 LEDs no disco dos azimutes e os 15 LEDs no disco das elevações. Fototransistor e a manga termoretratil


Colocação da manga no fototransistor Pino onde se colocará o fototransistor

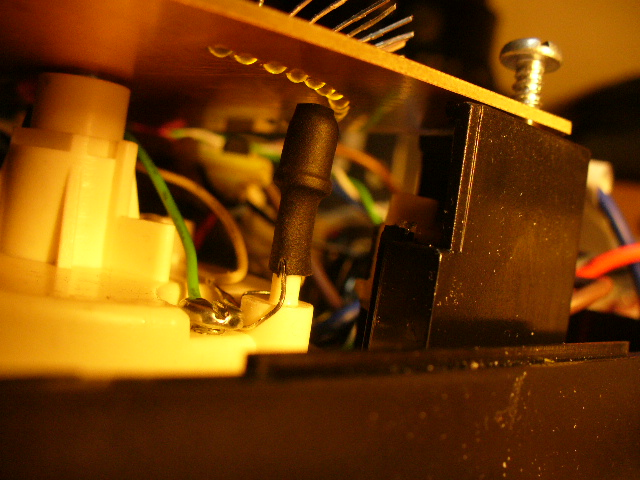
Fototransistor colocado. Os parafusos foram retirados por não serem necessários e prejudicarem o movimento do disco .
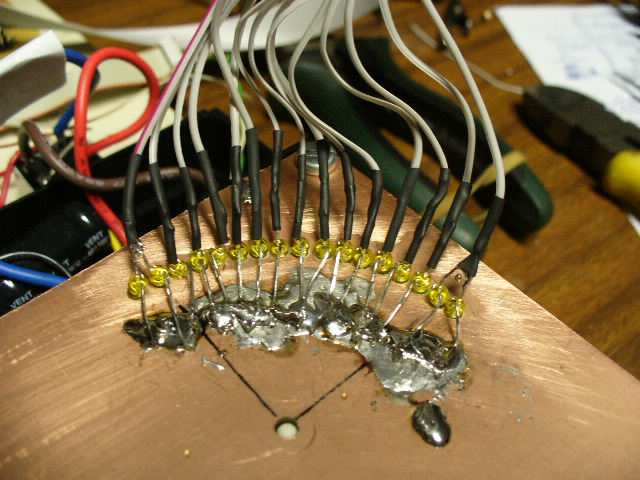
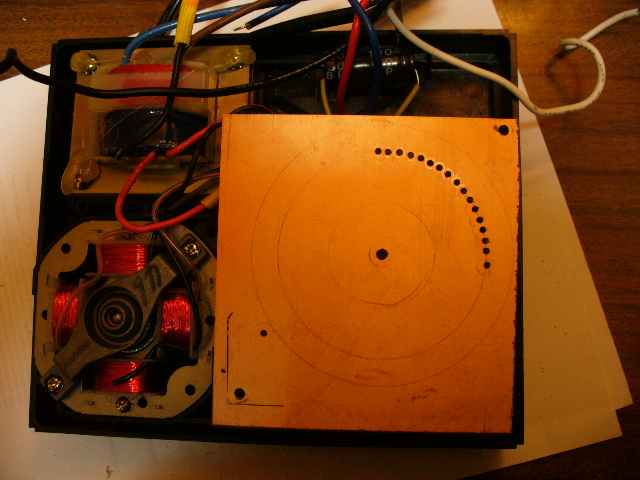
15 diodos das elevações colocados. Cada diodo representa o ângulo centro de um sector de 6º. Cabo de 16 condutores que liga o sector 0-90º das elevações à placa do Microcontrolador
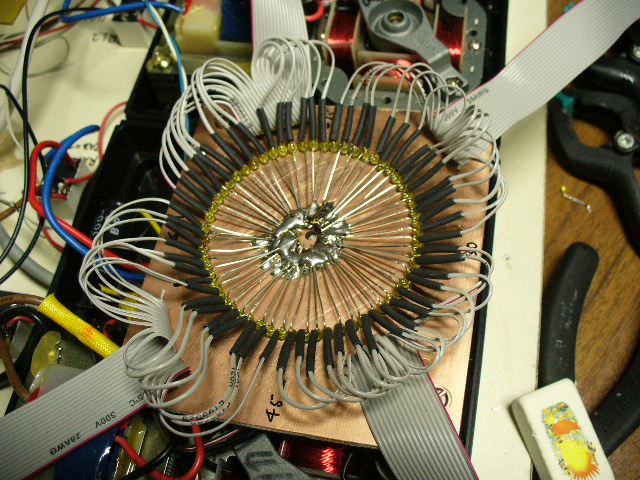
Para os Azimutes temos 60 sectores ( 60 leds) divididos em quatro quadrantes de 15 sectores. Quatro" flat cables" ligam os 15 diodos de cada um dos 4 sectores dos azimutes à placa do microcontrolador.
Nota: As placas dos azimutes e das elevações aqui mostradas são protótipos sem circuito impresso desenhado e sem fichas de 16 pinos.
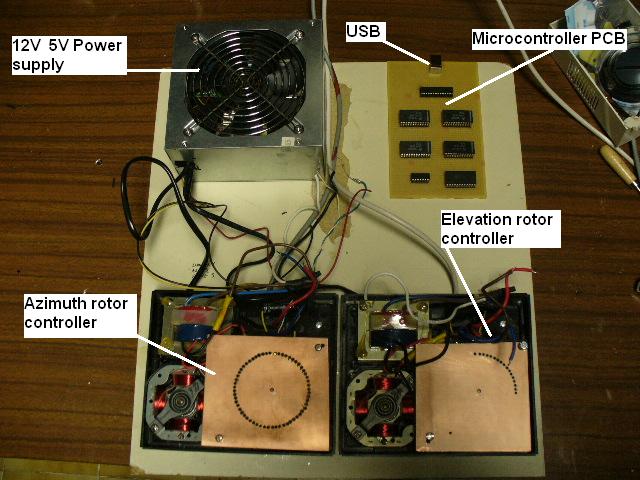
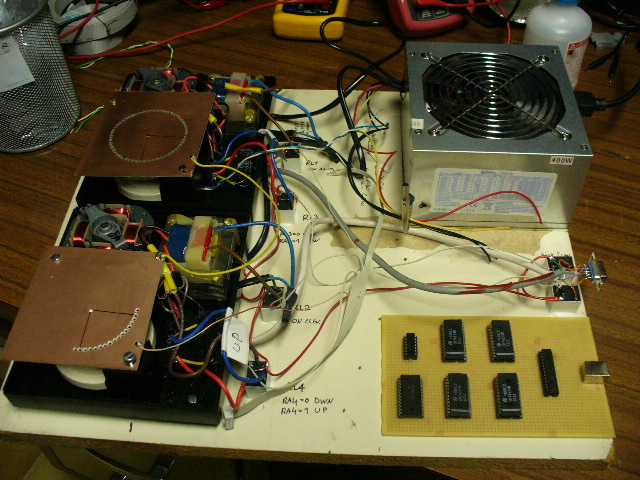
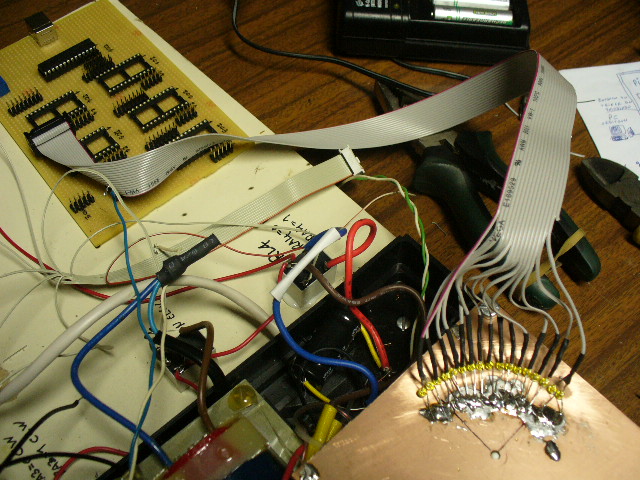
Aspecto geral do protótipo
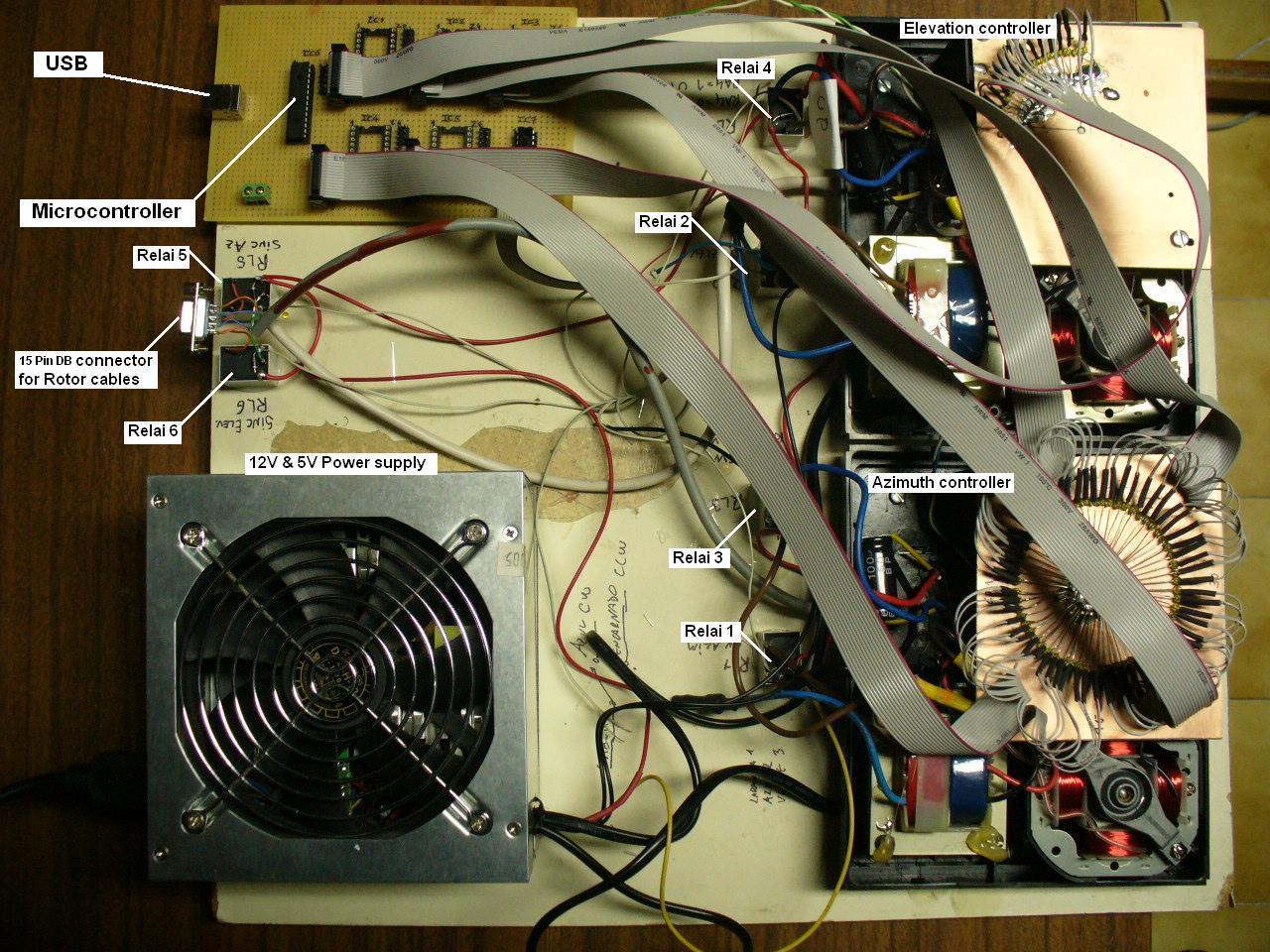
Na versão final do BB_TRACKER, todos os relés, cabos, fichas e fios serão colocados numa única placa de circuito impresso

COMO MODIFICAR OS ROTORES
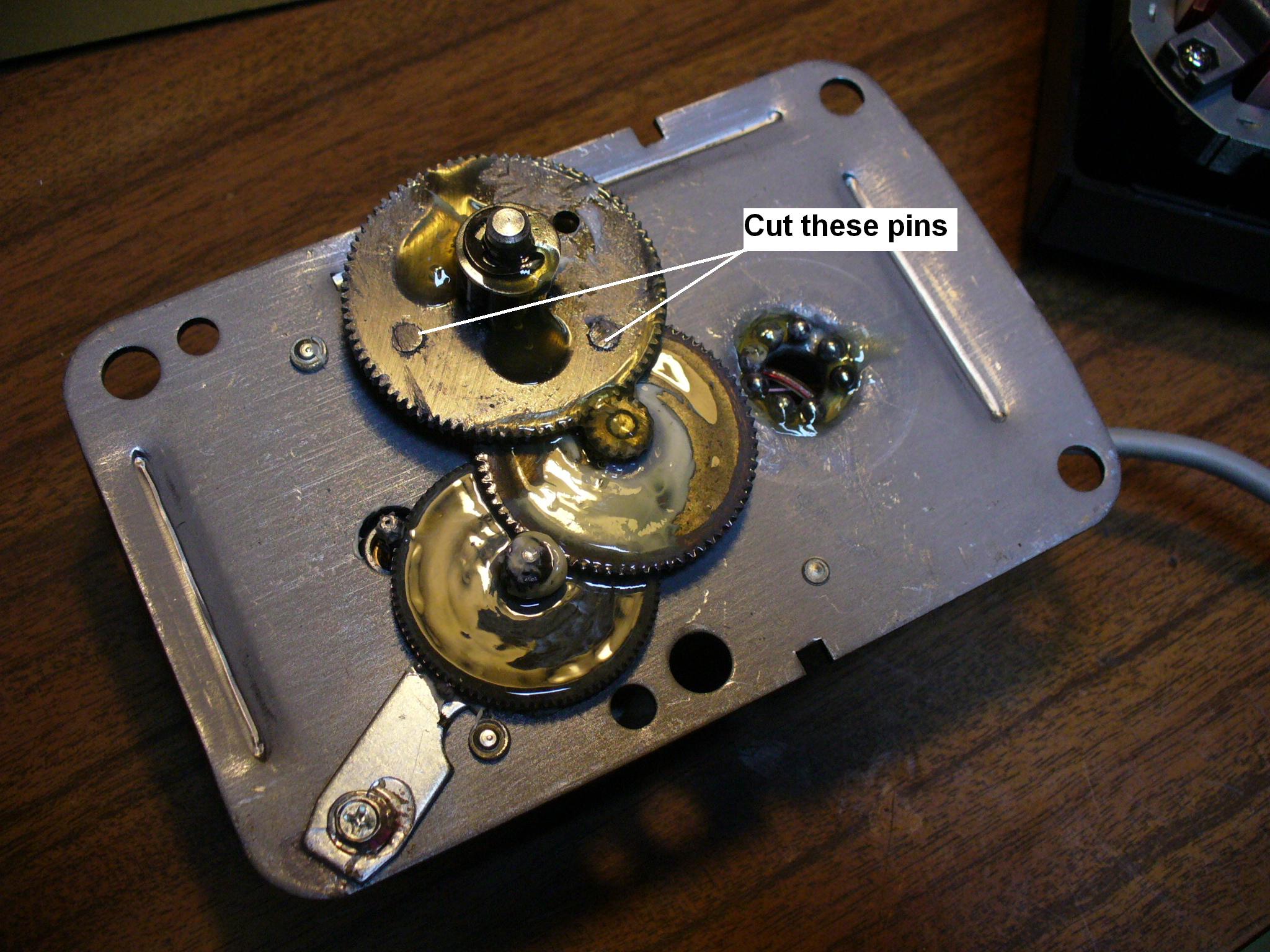
Removem-se os pinos de travamento somente no rotor dos
azimutes para permitir
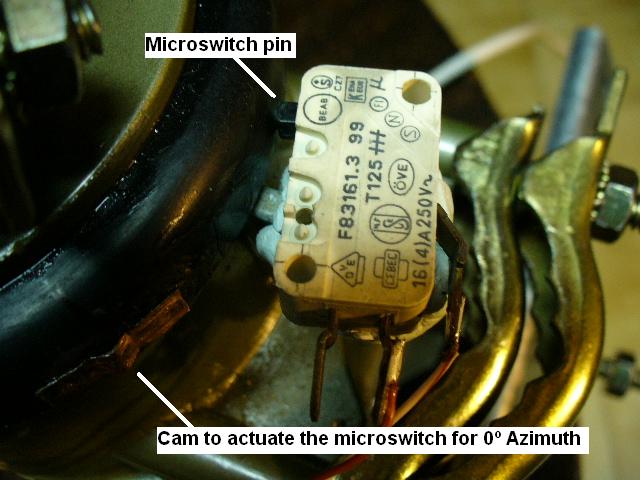
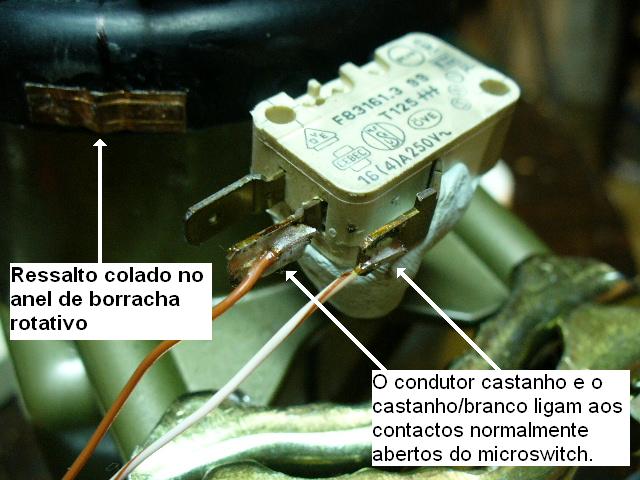
Microswitch instalado no Rotor do Azimute. O excêntrico que se vê "cam" actua o microswitch à passagem por zero parando o rotor.
O par de fios Castanho e Branco/Castanho pertencem ao cabo UTP CAT5 .
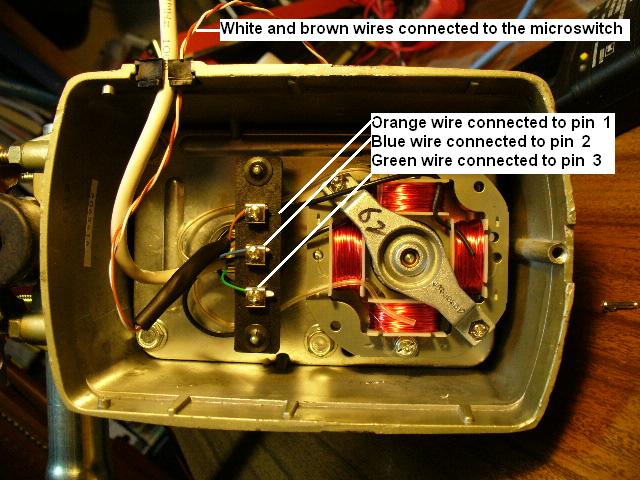
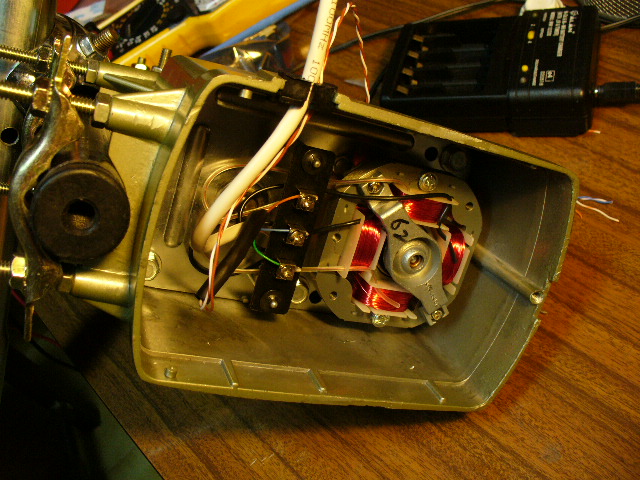
Ligação do cabo UTP ao rotores . Em ambos rotores, as ligações são as mesmas.

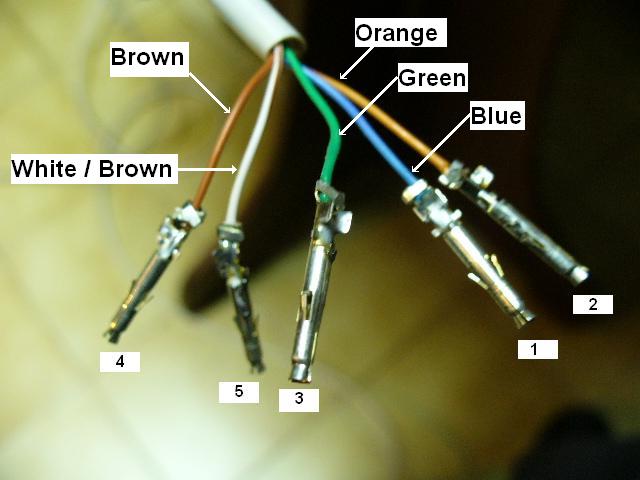
Fichas usadas e coladas aos rotores para permitir fácil transporte. Soldadura dos pinos fêmea da ficha
(A numeração mostrada é apenas para os pinos das fichas e não correspondem à numeração dos terminais dos rotores.)
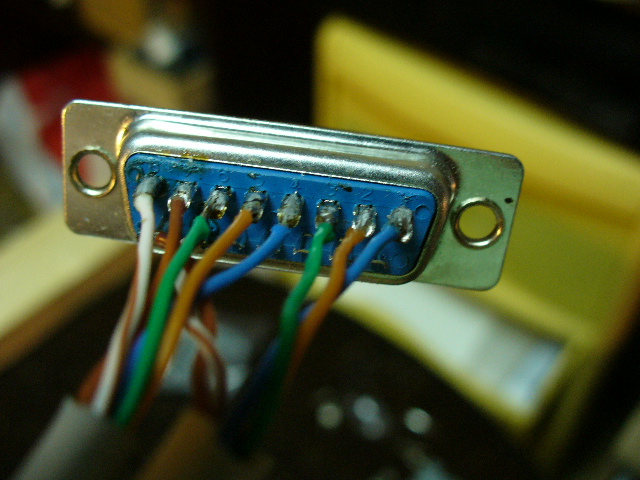
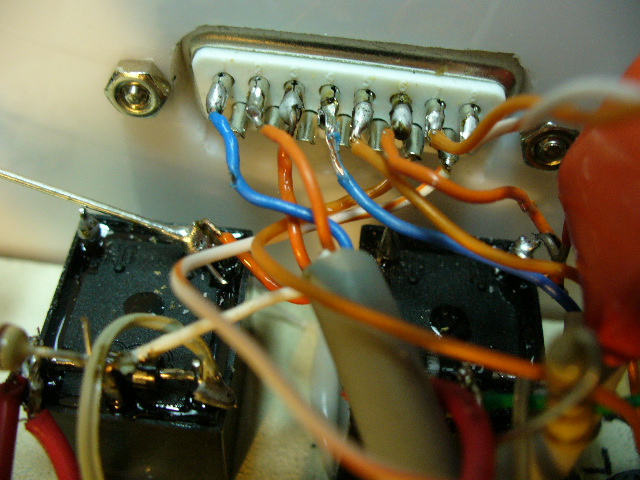
Soldadura dos dois cabos UTP (Azim.e Elev.) à ficha macho DB15. Ficha fêmea DB15 de painel (só existe no nosso protótipo) .
Na versão final esta ficha está na Placa Mãe de circuito impresso.
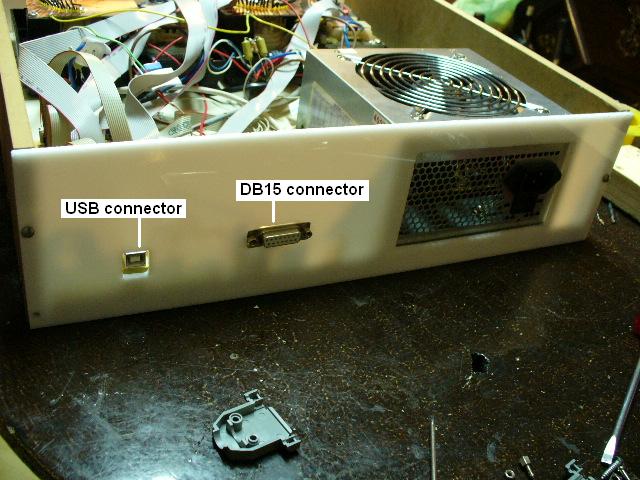

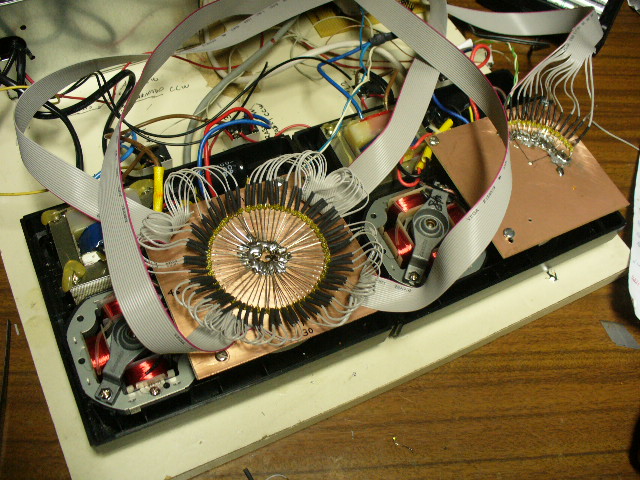
Vista traseira

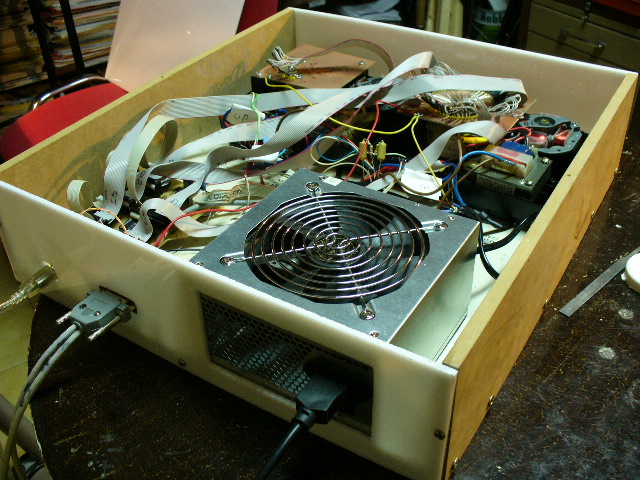
Vista do topo da caixa com a placa VERO do microcontrolador, os controladores dos rotores e a fonte de alimentação.

BB_TRACKER, Antenas, Rotores, Tripé, Mastro e Rádios prontos para um dia de Satélites no campo.
73 e tenham uma boa montagem